


Email: info@groupeclaret.com
Robotique
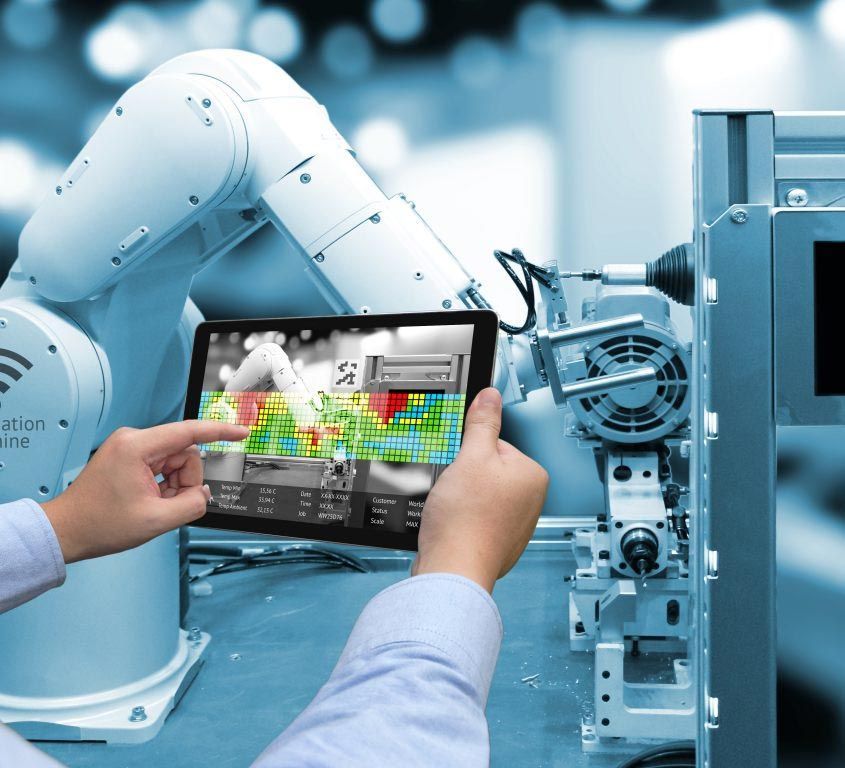
Application robotique mobile Omron LD
Domaine
Centre de distribution – services de préparation de commandes
Mandat
L’objectif du projet consistait à réduire au maximum la perte de temps des préparateurs de commande dans leurs déplacements dans la zone de picking et vers la zone d’emballage
Principaux défis
- Déployer rapidement en prototypage et valider les estimés de gain
- Tester et adapter l’équipement et la stratégie de stationnement et de déplacement dans l’environnement de travail réel
- Déterminer le nombre de robots mobiles et de stations de rechargement requis en phase de déploiement complet
Solutions apportées
- Intégration de robots mobiles autonome OMRON LD-105-CT
- Conception, fabrication et test de chariots nouvelle génération et de leurs stationnements
- Intégration de solutions informatiques Mobile Planner et Enterprise Manager
Manipulation robotisée de crêpe
Domaine
Alimentaire
Mandat
- Cadence de production élevée
- Manipuler simultanément 6 produits sur un convoyeur en mouvement
- Espace de travail limité
Principaux défis
- Déployer rapidement en prototypage et valider les estimés de gain
- Tester et adapter l’équipement et la stratégie de stationnement et de déplacement dans l’environnement de travail réel
- Déterminer le nombre de robots mobiles et de stations de rechargement requis en phase de déploiement complet
Solutions apportées
- Intégration d'un bras robot Stäubli Clean Room
- Conception d'un manipulateur sur-mesure
- Intégration d'un système de vision pour détecter la taille des crêpes
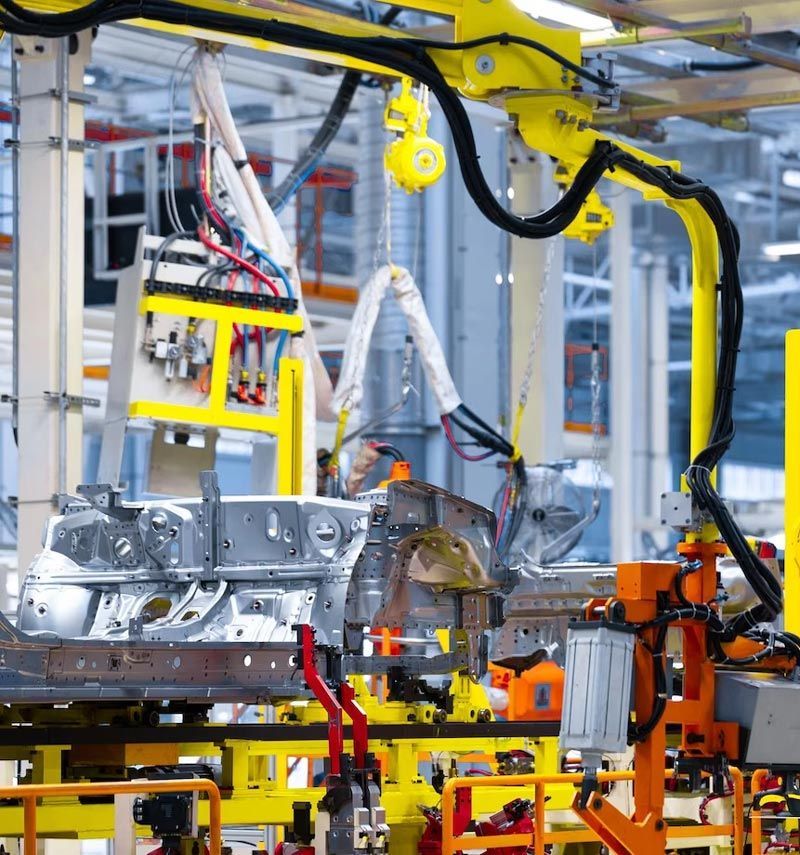
Ligne d’assemblage pour l’industrie automobile
Domaine
Automobile, ligne de production
Mandat
L'objectif du projet consistait à concevoir une ligne d'assemblage et conformage des segments de turbo de voiture sur leur axe.
Principaux défis
- Cadence de production élevée
- Grande précision
- Autonomie de la ligne
- Variété de modèle
Solutions apportées
- Intégration de la CRFM
- Outillage spécifique d'insertion
- Détection par fibre optique
- Chargement et déchargement automatiques
- Convoyeur d'approvisionnement
Chargement de four à trempe
Domaine
Industrie manufacturière
Mandat
L’objectif du projet consistait à effectuer l'alimentation en vitre de verre dans un four à trempe. Le sablage des rebords des verres devaient également être effectué durant le processus de trempe.
Principaux défis
- Intégration de la ligne automatisée dans un environnement restreint
- S’adapter à une vingtaine de dimensions de verres
- Manipuler les vitres de verre sans les briser
- Ne pas laisser de trace résiduelle (éraflures, fissures)
Solutions apportées
- Intégration d'un bras robot Fanuc
- Conception d'un manipulateur sur-mesure
- Développement en partenariat de ventouses sur-mesures
- Système d'identification du centre et des rebords des verres
- Automatisation du déplacement des sableuses
- Formation du personnel au logiciel de programmation
Groupe Claret
Nos Produits

INSCRIPTION À LA NEWSLETTER
RESTEZ À JOUR AVEC LE GROUPE CLARET
Restez à l’avant-garde de l’innovation et des tendances de l’industrie avec le Groupe Claret. Recevez des mises à jour, des informations et des actualités en temps opportun pour permettre à votre entreprise de réussir.
Newsletter Subscription

40 ans d'excellence en usinage, robotique et automatisation. Partenaires de confiance en machines spécialisées et composants de précision.
ROBOTFLY SYSTÈME
1400 Joliot Curie Boucherville, QC, J4B 7L9 CANADA
Tel : 1 (800) 567 7442
Fax : 1 (450) 449 1567
info@groupeclaret.com
CLARET FRANCE
1510 Avenue du Stade 74460, Marnaz FRANCE
Tel : +33 4 50 98 23 53
Fax : +33 4 50 96 27 16
info@groupeclaret.com
LIENS RAPIDES